- 締切済み
スカラーロボットの選定に悩む
- スカラーロボットの選定について悩んでいます。カタログには許容トルク、許容モーメント、許容慣性モーメント等の記載がありますが、どう選定して良いのか悩んでいます。
- スカラーロボットの選定について、メーカーに問い合わせたものの担当者毎に回答が違い、判断がつかない状況です。アドバイスを頂けると助かります。
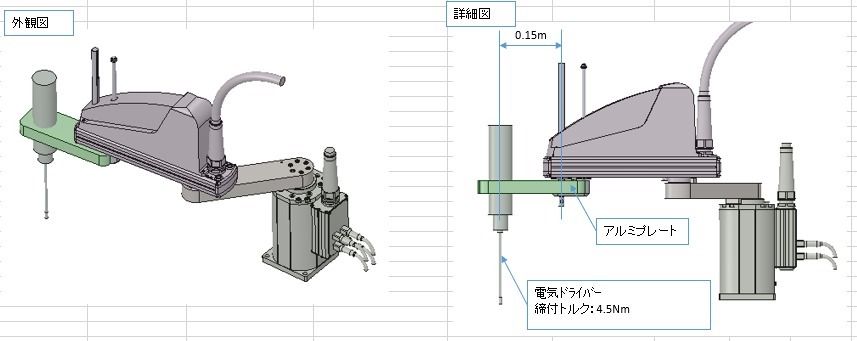
- 4軸スカラーロボットを使って電気ドライバーの取り付けを行いたいが、トルクやモーメントについての適切な選定が難しいです。

- kengoohuchi
- お礼率25% (1/4)
- その他(ロボット)
- 回答数4
- ありがとう数6
- みんなの回答 (4)
- 専門家の回答
みんなの回答
- lumiheart
- ベストアンサー率47% (1142/2410)
ロボット以前の問題として 普通に電動ドライバを人の手で握ってネジ締めした時 ネジ締めの反動トルクで振られて チョット気を緩めるとすぐにネジをナメてしまいますね で、本件では 電動ドライバを取り付けてるアルミプレートの剛性は計算したんでしょうぁ? 見た目ヘナヘナで電動ドライバの反動トルクで反ってしまいそうなんですけど? 大丈夫? 同様の事がロボット本体にも言える 右端のロボット支持点からドライバまでの総合剛性がちゃんと有れば良いのですが もし、剛性が足りなければネジは舐めてしまう http://www.iai-robot.co.jp/product/details/IX-NNN80__H/index.html https://www.yamaha-motor.co.jp/robot/lineup/ykxg/middle/ 昔の話ですが スカラロボットでなく、普通に直行ロボットでネジ締めやったとき 剛性不足に悩まされた 高剛性の両端支持タイプなら良かったんでしょうけれど http://www.iai-robot.co.jp/product/details/ICSB3_ICSPB3-GB_HS1_/index.html 安く挙げようと片持ち支持 http://www.iai-robot.co.jp/product/details/ICSB2_ICSPB2-BE_M/index.html 因みに私は制御設計であって機械設計ではないけれど ネジ締めがうまく出来ないのは制御屋がヘボだからと言われてしまった 剛性が足りないのを制御屋のせいにはしないようにね 制御屋が優秀なら剛性不足を回避してくれるかも知れないけれど
- hahaha8635
- ベストアンサー率22% (800/3610)
各1軸 ドライバー衷心より距離を出しモーメントを求めればいいんじゃないかという前に ブレーキ付きのがあれば計算しなくても終了
- TIGANS
- ベストアンサー率35% (245/681)
確かに計算上は最大30Nの力がかかりますが 力がかかるときにはドライバは舳固定されている状態になりますので そのジョイントには舳と平行な方向でのトルクしかかかりません。 ドライバ舳とロボットの舳が平行であれば30Nはあまり心配無いかと ただし固定部に近い回転舳に回転方向トルクが伝わることは忘れずに。 本図ではドライバの作用点とロボットの上下舳支持点がずれており ロボットの腕にねじりトルクがかかるので力学的に複雑化してしまい (なので担当ごとに言い方が変わっているのではないでしょうか) 傾斜舳が回転トルクでガタつくことになるかもしれません。 アルミプレートの形状を修正してドライバーのネジ締め付け時に ドライバ作用点とロボットの支持点の上下関係が少なくなるようにして ネジ締め付け時の反動トルクがロボット可動軸方向と垂直になるように 工夫されてみては?
- 中京区 桑原町(@l4330)
- ベストアンサー率22% (4373/19606)
30Nはドライバーを上に持ち上げる様に働くのですね。 その力はドライバーの重量を無くす方向に働きます。 普通に考えればドライバーの3kgf程度でしょう、30Nの力が上方向に働けばロボットから見れば負荷が無くなった様になりますね。 つまり30Nは無視して良い力です。









お礼
アドバイスありがとうございます。 ドライバーの作用点とロボットの支持点が上下方向にずれているのも ねじれ発生するので注意しなければならないことですね。 lumiheart さんの指摘にもありますが装置の剛性を注意しないといけないですね。 アドバイスありがとうございます。